

FD Series (BLDC motors)
FD Series realizes flexible, smooth, and powerful motors with the world's highest torque density based on magnetic field technology.
Our Products
FD Series
FD-90-15-g
Reducer integrated models
FD-90-15-f
Frameless Model
FD-90-15
Frameless Model
FD-60-25-f
Frameless Model
High Torque Density
Achieving the world's highest torque density based on magnetic fields through special magnetic materials and design optimization
Low Cogging Torque & Pulsation
Realization of low cogging torque and low ripple through technology implementing ideal sinusoidal back-electromotive force in stator and rotor
Smooth Safety
Realization of a flexible and safe joint design resilient to external impacts through high backdrivability
Application Case
I recommend motors suitable for various robots and industries.
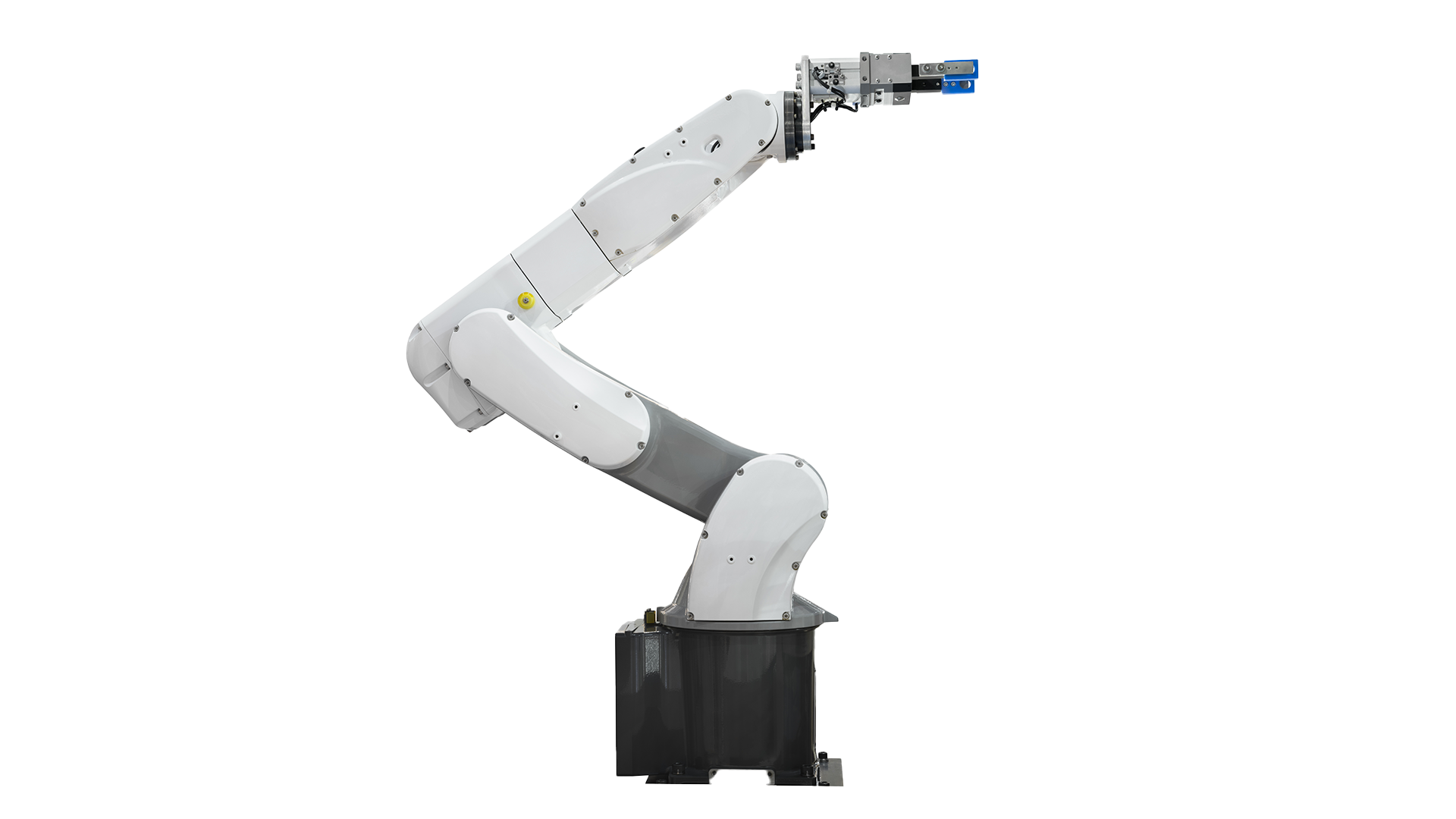
협동 로봇
Collaborative Robot
Collaborative robots are robots designed to work safely in the same workspace as humans through physical interaction. In particular, high torque density motors applied to collaborative robots are the key to creating a safe collaborative environment and
safe collaboration with workers and improved work performance. High-torque density motors generate high torque while minimizing the size and weight of the robot, and provide a safe working environment with excellent reverse drive when in contact with a human operator by minimizing the impact of the reducer.
휴머노이드 로봇
Humanoid Robot
Humanoid robots are robots that embody a human-like form and behavior and are intended to mimic and interact with various human activities. In humanoid robots, high torque density motors are a key factor in achieving stable motion and improving energy efficiency. High torque density motors can deliver high torque performance in a miniaturized size, minimizing the size and weight of the robot, which enables optimization of space utilization. In particular, they enable stable walking through immediate response to external impacts and smooth motion transitions, and enable continuous operation with high energy efficiency. In addition, precise force control enables safety when interacting with humans, which directly affects the practicality and performance of humanoid robots.
4족 보행 로봇
Quadruped Robot
Quadrupedal robots require stable walking and fast maneuverability over uneven terrain, and high torque density motors are key to ensuring dynamic stability and improving energy efficiency. High torque density motors deliver high torque performance at a miniaturized size and light weight, enabling fast attitude control and instantaneous response to sudden impacts or load changes. Quadrupedal robots require precise force control at each leg joint and must effectively absorb shocks from interaction with the ground. High-torque-density motors enable stable walking with precise torque control and fast response, while efficient energy use enables long-running operation.
착용형 로봇
Wearable Robot
Wearable robots are robots that are directly attached to the human body to assist or augment its movements. High torque density motors, especially when applied to wearable robots, are a key factor in lightweighting the device and improving user comfort. High-torque density motors can deliver high torque performance in a miniaturized size and volume to minimize the burden on the wearer, and their low cogging torque and excellent reverse drive can improve the wearer’s natural motion and work efficiency.
물류 로봇
Logistics Robot
Logistics robots are robots that safely and efficiently transport items of various sizes and weights. In logistics robots, high torque density motors are key to efficient operation in limited space and optimized energy consumption. High torque density motors deliver high torque performance in a compact size to maximize the robot’s payload capacity and provide stable operation even during rapid acceleration, deceleration, and directional changes. Logistics robots require precise positioning and stable travel in narrow aisles and complex logistics environments. High-torque-density motors enable efficient logistics operations with precise speed control and excellent response, while their high energy efficiency enables continuous operation for long periods of time. As such, high torque density motors are a key factor in determining the working efficiency and uptime of logistics robots, which in turn directly impacts the productivity and reliability of logistics systems.
협동 로봇
Collaborative Robot
Collaborative robots are robots designed to work safely in the same workspace as humans through physical interaction. In particular, high torque density motors applied to collaborative robots are the key to creating a safe collaborative environment and
safe collaboration with workers and improved work performance. High-torque density motors generate high torque while minimizing the size and weight of the robot, and provide a safe working environment with excellent reverse drive when in contact with a human operator by minimizing the impact of the reducer.
휴머노이드 로봇
Humanoid Robot
Humanoid robots are robots that embody a human-like form and behavior and are intended to mimic and interact with various human activities. In humanoid robots, high torque density motors are a key factor in achieving stable motion and improving energy efficiency. High torque density motors can deliver high torque performance in a miniaturized size, minimizing the size and weight of the robot, which enables optimization of space utilization. In particular, they enable stable walking through immediate response to external impacts and smooth motion transitions, and enable continuous operation with high energy efficiency. In addition, precise force control enables safety when interacting with humans, which directly affects the practicality and performance of humanoid robots.
4족 보행 로봇
Quadruped Robot
Quadrupedal robots require stable walking and fast maneuverability over uneven terrain, and high torque density motors are key to ensuring dynamic stability and improving energy efficiency. High torque density motors deliver high torque performance at a miniaturized size and light weight, enabling fast attitude control and instantaneous response to sudden impacts or load changes. Quadrupedal robots require precise force control at each leg joint and must effectively absorb shocks from interaction with the ground. High-torque-density motors enable stable walking with precise torque control and fast response, while efficient energy use enables long-running operation.
착용형 로봇
Wearable Robot
Wearable robots are robots that are directly attached to the human body to assist or augment its movements. High torque density motors, especially when applied to wearable robots, are a key factor in lightweighting the device and improving user comfort. High-torque density motors can deliver high torque performance in a miniaturized size and volume to minimize the burden on the wearer, and their low cogging torque and excellent reverse drive can improve the wearer’s natural motion and work efficiency.
물류 로봇
Logistics Robot
Logistics robots are robots that safely and efficiently transport items of various sizes and weights. In logistics robots, high torque density motors are key to efficient operation in limited space and optimized energy consumption. High torque density motors deliver high torque performance in a compact size to maximize the robot’s payload capacity and provide stable operation even during rapid acceleration, deceleration, and directional changes. Logistics robots require precise positioning and stable travel in narrow aisles and complex logistics environments. High-torque-density motors enable efficient logistics operations with precise speed control and excellent response, while their high energy efficiency enables continuous operation for long periods of time. As such, high torque density motors are a key factor in determining the working efficiency and uptime of logistics robots, which in turn directly impacts the productivity and reliability of logistics systems.
Q&A
답변 준비중
나라의 말이 중국과 달라 문자와 서로 통하지 아니하므로, 이런 까닭으로 어리석은[5] 백성이 이르고자 하는 바가 있어도 마침내 제 뜻을 능히 펴지 못하는 사람이 많으니라. 내가 이를 위하여 가엾게 여겨 새로 스물여덟 자를 만드니 사람마다 하여금 쉽게 익혀 날로 쓰기 편하게 하고자 할 따름이니라.
나라의 말이 중국과 달라 문자와 서로 통하지 아니하므로, 이런 까닭으로 어리석은[5] 백성이 이르고자 하는 바가 있어도 마침내 제 뜻을 능히 펴지 못하는 사람이 많으니라. 내가 이를 위하여 가엾게 여겨 새로 스물여덟 자를 만드니 사람마다 하여금 쉽게 익혀 날로 쓰기 편하게 하고자 할 따름이니라.