

Application
다양한 산업군에 맞춤 모터
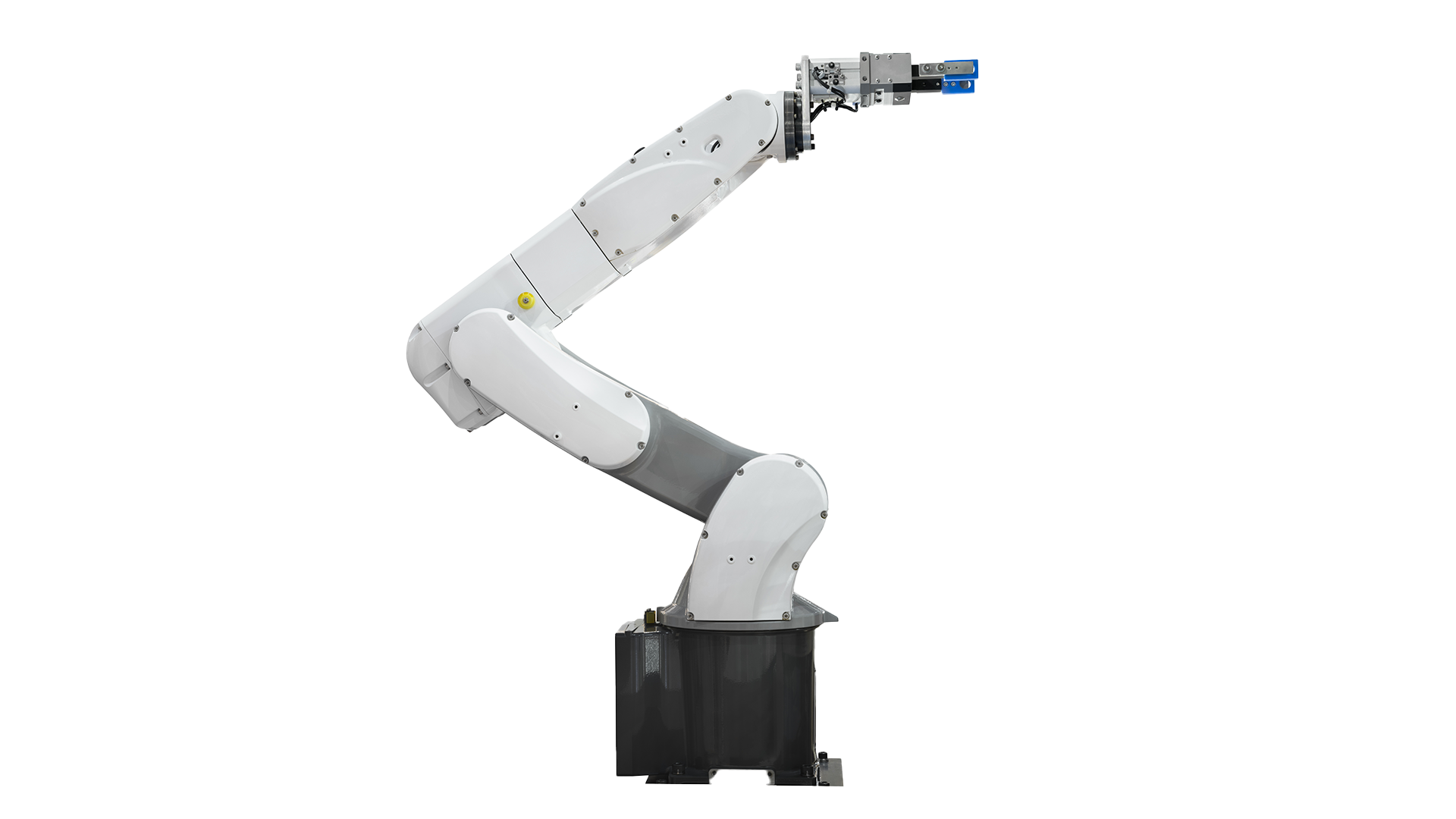
Collaborative Robot
협동 로봇
협동로봇은 인간과 동일한 작업공간에서 물리적 상호작용을 통해 안전하게 작업할 수 있도록 설계된 로봇입니다. 특히 협동로봇에 적용되는 고토크밀도 모터는 작업자와의
안전한 협업 환경 구축과 작업 성능 향상을 위한 핵심 요소입니다. 고토크밀도 모터는 로봇의 크기와 중량을 최소화하면서도 높은 토크를 발생시키며, 감속기의 영향을 최소화하여 작업자와의 접촉 시 우수한 역구동성으로 안전한 작업환경을 제공합니다.
Humanoid Robot
휴머노이드 로봇
휴머노이드 로봇은 인간과 유사한 형태와 동작을 구현하는 로봇으로, 다양한 인간 활동의 모사와 상호작용을 목적으로 합니다. 특히 휴머노이드 로봇에서 고토크밀도 모터는 안정적인 동작 구현과 에너지 효율성 향상을 위한 핵심 요소입니다. 고토크밀도 모터는 소형화된 크기로도 높은 토크성능을 발휘하여 로봇의 크기와 중량을 최소화할 수 있으며, 이는 공간 활용의 최적화를 가능하게 합니다. 특히 외부 충격에 대한 즉각적인 반응과 부드러운 동작 전환을 통해 안정적인 보행이 가능하며, 높은 에너지 효율성으로 지속적인 운용이 가능합니다. 또한 인간과의 상호작용 시 정밀한 힘 제어를 통해 안전성을 확보할 수 있어, 이는 결과적으로 휴머노이드 로봇의 실용성과 성능 향상에 직접적인 영향을 미칩니다.
Quadruped Robot
4족 보행 로봇
4족 보행 로봇은 불규칙한 지형에서도 안정적인 보행과 빠른 기동성을 필요로 하는 로봇입니다. 특히 4족 보행 로봇에서 고토크밀도 모터는 동적 안정성 확보와 에너지 효율성 향상을 위한 핵심 요소입니다. 고토크밀도 모터는 소형화된 크기와 경량화된 무게로도 높은 토크성능을 발휘하여 빠른 자세 제어가 가능하며, 갑작스러운 충격이나 하중 변화에도 즉각적인 대응이 가능합니다. 4족 보행 로봇은 각 다리의 관절마다 정확한 힘 제어가 요구되며, 지면과의 상호작용에서 발생하는 충격을 효과적으로 흡수해야 합니다. 고토크밀도 모터는 정밀한 토크 제어와 빠른 응답성으로 안정적인 보행을 가능하게 하며, 효율적인 에너지 사용으로 장시간 운용이 가능합니다.
Wearable Robot
착용형 로봇
착용형 로봇은 인간의 신체에 직접 부착되어 동작을 보조하거나 증강시키는 로봇입니다. 특히 착용형 로봇에 적용되는 고토크밀도 모터는 장치의 경량화와 사용자의 편의성 향상을 위한 핵심 요소입니다. 고토크밀도 모터는 소형화된 크기와 부피로도 높은 토크성능을 발휘하여 착용자의 부담을 최소화하며, 낮은 코깅토크와 우수한 역구동성은 착용자의 자연스로운 동작과 작업 효율을 향상시킬 수 있습니다.
Logistics Robot
물류 로봇
물류 로봇은 다양한 크기와 무게의 물품을 안전하고 효율적으로 운반하는 로봇입니다. 특히 물류 로봇에서 고토크밀도 모터는 제한된 공간 내에서의 효율적인 작동과 에너지 소비 최적화를 위한 핵심 요소입니다. 고토크밀도 모터는 소형화된 크기로도 높은 토크성능을 발휘하여 로봇의 적재 용량을 최대화할 수 있으며, 급격한 가감속과 방향 전환 시에도 안정적인 주행이 가능합니다. 물류 로봇은 좁은 통로나 복잡한 물류 환경에서 정확한 위치 제어와 안정적인 주행이 요구됩니다. 고토크밀도 모터는 정밀한 속도 제어와 우수한 응답성으로 효율적인 물류 작업을 가능하게 하며, 높은 에너지 효율로 장시간 연속 운용이 가능합니다. 이처럼 고토크밀도 모터는 물류 로봇의 작업 효율성과 운용 시간을 결정하는 핵심 요소로, 이는 결과적으로 물류 시스템의 생산성과 안정성 향상에 직접적인 영향을 미칩니다.
Collaborative Robot
협동 로봇
협동로봇은 인간과 동일한 작업공간에서 물리적 상호작용을 통해 안전하게 작업할 수 있도록 설계된 로봇입니다. 특히 협동로봇에 적용되는 고토크밀도 모터는 작업자와의
안전한 협업 환경 구축과 작업 성능 향상을 위한 핵심 요소입니다. 고토크밀도 모터는 로봇의 크기와 중량을 최소화하면서도 높은 토크를 발생시키며, 감속기의 영향을 최소화하여 작업자와의 접촉 시 우수한 역구동성으로 안전한 작업환경을 제공합니다.
Humanoid Robot
휴머노이드 로봇
휴머노이드 로봇은 인간과 유사한 형태와 동작을 구현하는 로봇으로, 다양한 인간 활동의 모사와 상호작용을 목적으로 합니다. 특히 휴머노이드 로봇에서 고토크밀도 모터는 안정적인 동작 구현과 에너지 효율성 향상을 위한 핵심 요소입니다. 고토크밀도 모터는 소형화된 크기로도 높은 토크성능을 발휘하여 로봇의 크기와 중량을 최소화할 수 있으며, 이는 공간 활용의 최적화를 가능하게 합니다. 특히 외부 충격에 대한 즉각적인 반응과 부드러운 동작 전환을 통해 안정적인 보행이 가능하며, 높은 에너지 효율성으로 지속적인 운용이 가능합니다. 또한 인간과의 상호작용 시 정밀한 힘 제어를 통해 안전성을 확보할 수 있어, 이는 결과적으로 휴머노이드 로봇의 실용성과 성능 향상에 직접적인 영향을 미칩니다.
Quadruped Robot
4족 보행 로봇
4족 보행 로봇은 불규칙한 지형에서도 안정적인 보행과 빠른 기동성을 필요로 하는 로봇입니다. 특히 4족 보행 로봇에서 고토크밀도 모터는 동적 안정성 확보와 에너지 효율성 향상을 위한 핵심 요소입니다. 고토크밀도 모터는 소형화된 크기와 경량화된 무게로도 높은 토크성능을 발휘하여 빠른 자세 제어가 가능하며, 갑작스러운 충격이나 하중 변화에도 즉각적인 대응이 가능합니다. 4족 보행 로봇은 각 다리의 관절마다 정확한 힘 제어가 요구되며, 지면과의 상호작용에서 발생하는 충격을 효과적으로 흡수해야 합니다. 고토크밀도 모터는 정밀한 토크 제어와 빠른 응답성으로 안정적인 보행을 가능하게 하며, 효율적인 에너지 사용으로 장시간 운용이 가능합니다.
Wearable Robot
착용형 로봇
착용형 로봇은 인간의 신체에 직접 부착되어 동작을 보조하거나 증강시키는 로봇입니다. 특히 착용형 로봇에 적용되는 고토크밀도 모터는 장치의 경량화와 사용자의 편의성 향상을 위한 핵심 요소입니다. 고토크밀도 모터는 소형화된 크기와 부피로도 높은 토크성능을 발휘하여 착용자의 부담을 최소화하며, 낮은 코깅토크와 우수한 역구동성은 착용자의 자연스로운 동작과 작업 효율을 향상시킬 수 있습니다.
Logistics Robot
물류 로봇
물류 로봇은 다양한 크기와 무게의 물품을 안전하고 효율적으로 운반하는 로봇입니다. 특히 물류 로봇에서 고토크밀도 모터는 제한된 공간 내에서의 효율적인 작동과 에너지 소비 최적화를 위한 핵심 요소입니다. 고토크밀도 모터는 소형화된 크기로도 높은 토크성능을 발휘하여 로봇의 적재 용량을 최대화할 수 있으며, 급격한 가감속과 방향 전환 시에도 안정적인 주행이 가능합니다. 물류 로봇은 좁은 통로나 복잡한 물류 환경에서 정확한 위치 제어와 안정적인 주행이 요구됩니다. 고토크밀도 모터는 정밀한 속도 제어와 우수한 응답성으로 효율적인 물류 작업을 가능하게 하며, 높은 에너지 효율로 장시간 연속 운용이 가능합니다. 이처럼 고토크밀도 모터는 물류 로봇의 작업 효율성과 운용 시간을 결정하는 핵심 요소로, 이는 결과적으로 물류 시스템의 생산성과 안정성 향상에 직접적인 영향을 미칩니다.